|
I am a Senior Research Scientist at Google DeepMind. Previously, I was a Senior Research Scientist at Ambi Robotics. Before that, I was a PhD Student at UC Berkeley in the UC Berkeley AUTOLAB, a part of the Berkeley Artificial Intelligence Research (BAIR) Lab, and the Real-Time Intelligent Secure Explainable Systems (RISE) Lab, advised by Ken Goldberg and Joseph Gonzalez. I am interested in safe and efficient learning algorithms for robots. |

|
|
|
|
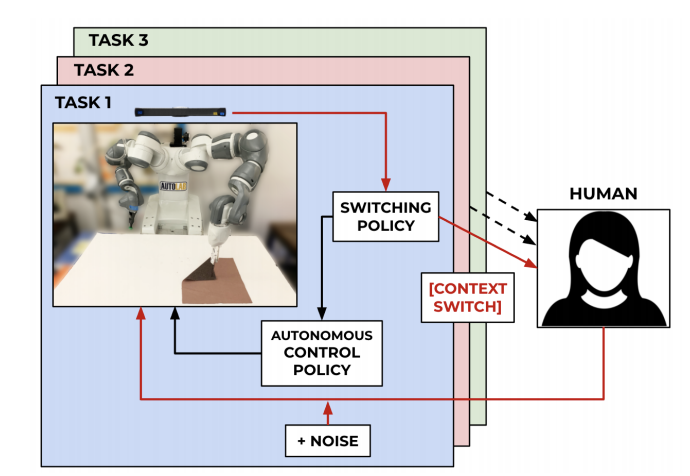
Ryan Hoque, Lawrence Yunliang Chen, Satvik Sharma, Karthik Dharmarajan, Brijen Thananjeyan, Pieter Abbeel, Ken Goldberg Conference on Robot Learning (CoRL), 2022. Oral Presentation |
|
|
Brijen Thananjeyan*, Justin Kerr*, Huang Huang, Joseph E. Gonzalez, Ken Goldberg IEEE International Conference on Intelligent Robots and Systems (IROS), 2022. pdf / website / code |

|
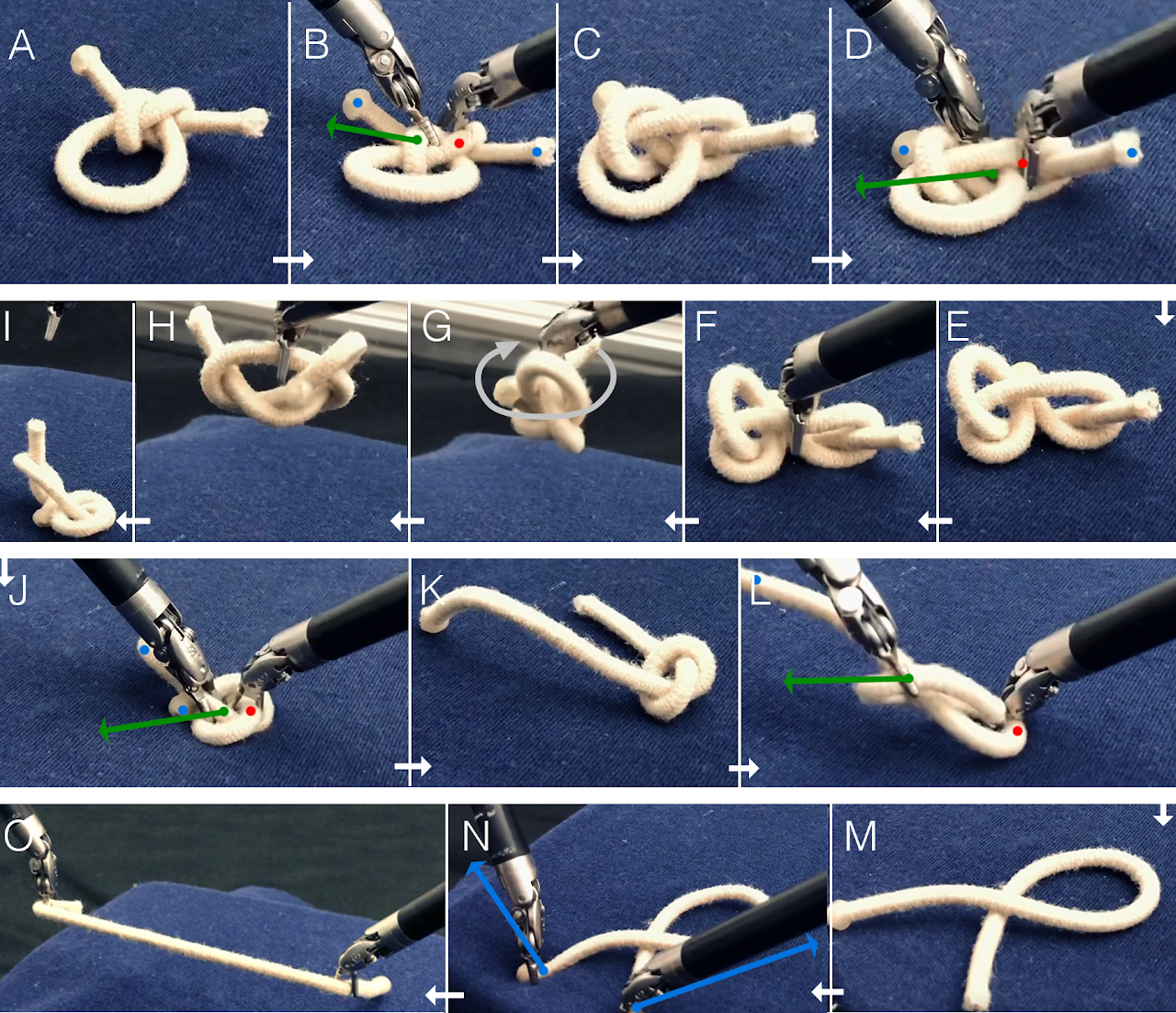
Vainavi Viswanath*, Kaushik Shivakumar*, Justin Kerr*, Brijen Thananjeyan, Ellen Novoseller, Jeffrey Ichnowski, Alejandro Escontrela, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg Robotics: Science and Systems (RSS), 2022. Best Systems Paper Award pdf / website |

|
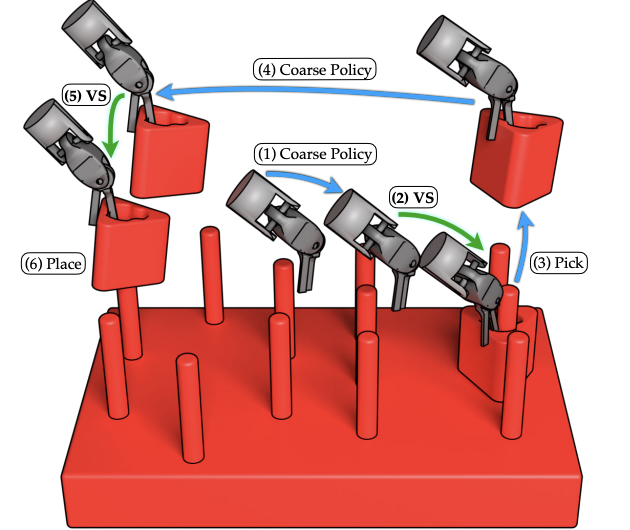
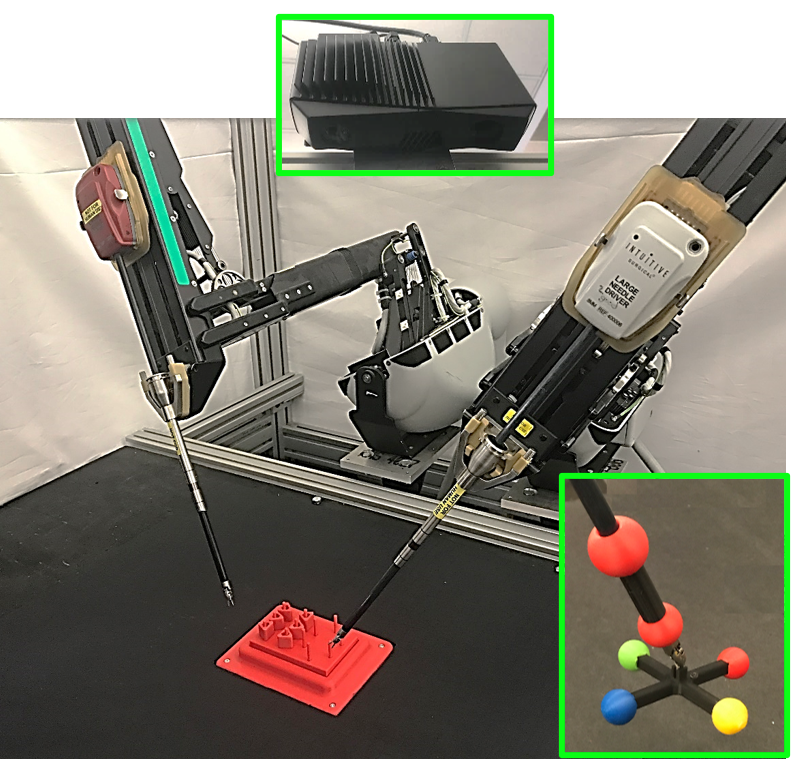
Albert Wilcox*, Justin Kerr*, Brijen Thananjeyan, Jeff Ichnowski, Minho Hwang, Samuel Paradis, Danyal Fer, Ken Goldberg IEEE International Conference on Robotics and Automation (ICRA), 2022. pdf / website |
|
Brijen Thananjeyan, Kirthevasan Kandasamy, Ion Stoica, Michael I. Jordan, Ken Goldberg, Joseph E. Gonzalez Arxiv, 2021. |

|
Thomas Kollar*, Michael Laskey*, Kevin Stone*, Brijen Thananjeyan*, Mark Tjersland* Conference on Robot Learning (CoRL), 2021. pdf / website / blog post / code |
|
Albert Wilcox*, Ashwin Balakrishna*, Brijen Thananjeyan, Joseph E. Gonzalez, Ken Goldberg Conference on Robot Learning (CoRL), 2021. pdf / website / code |
|
Vainavi Viswanath*, Jennifer Grannen*, Priya Sundaresan*, Brijen Thananjeyan, Ashwin Balakrishna, Ellen Novoseller, Jeffrey Ichnowski, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg IEEE International Conference on Intelligent Robots and Systems (IROS), 2021. |
|
Ryan Hoque, Ashwin Balakrishna, Carl Putterman, Michael Luo, Daniel S. Brown, Daniel Seita, Brijen Thananjeyan, Ellen Novoseller, Ken Goldberg IEEE International Conference on Automation Science and Engineering (CASE), 2021. |
|
Priya Sundaresan*, Jennifer Grannen*, Brijen Thananjeyan, Ashwin Balakrishna, Jeffrey Ichnowski, Ellen Novoseller, Minho Hwang, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg Robotics: Science and Systems (RSS), 2021. pdf / website |
|
Brijen Thananjeyan, Kirthevasan Kandasamy, Ion Stoica, Michael I. Jordan, Ken Goldberg, Joseph E. Gonzalez International Conference on Machine Learning (ICML), 2021. Long Presentation |
|
Brijen Thananjeyan*, Ashwin Balakrishna*, Suraj Nair, Michael Luo, Krishnan Srinivasan, Minho Hwang, Joseph E. Gonzalez, Julian Ibarz, Chelsea Finn, Ken Goldberg IEEE Robotics and Automation Letters (RA-L) July 2021 and IEEE International Conference on Robotics and Automation (ICRA), 2021. website / pdf |
|
|
Minho Hwang, Brijen Thananjeyan, Daniel Seita, Jeffrey Ichnowksi, Samuel Paradis, Danyal Fer, Thomas Low, Ken Goldberg arXiv 2020. pdf / New York Times article / website / code / 3D models |
|
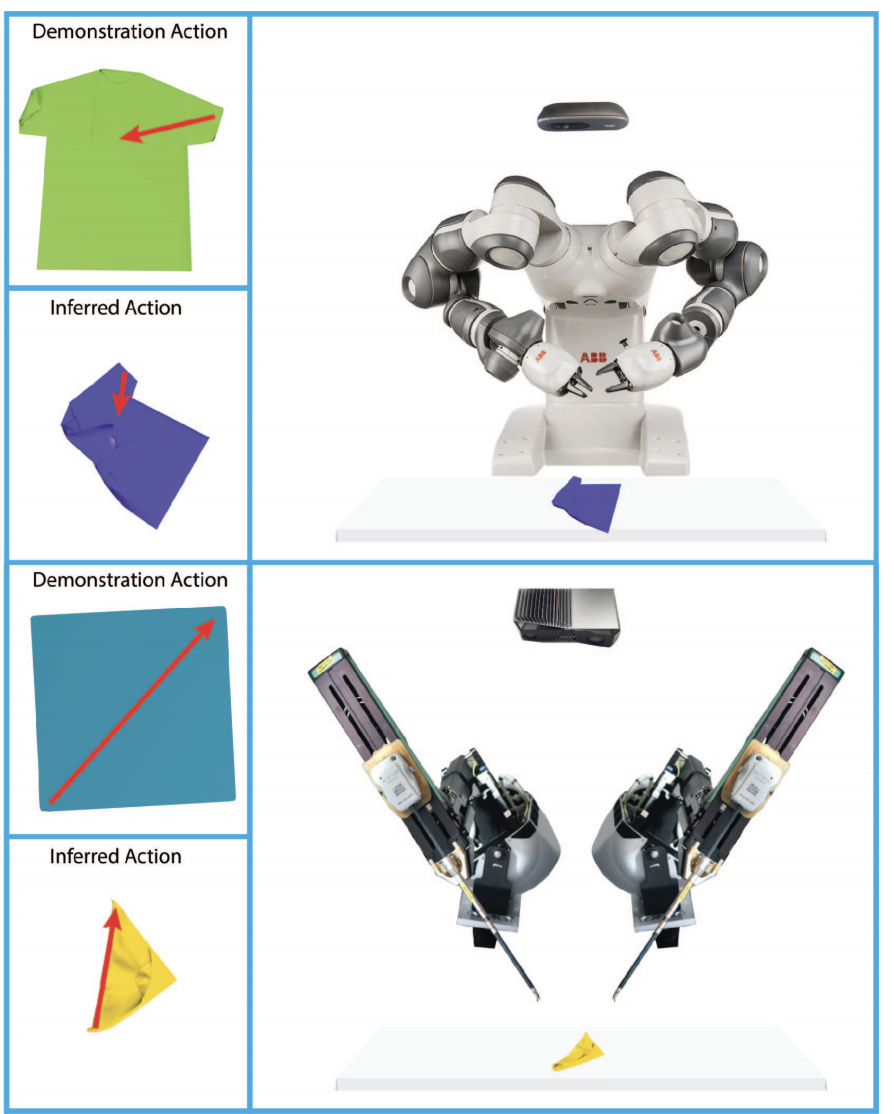
Aditya Ganapathi, Priya Sundaresan, Brijen Thananjeyan, Ashwin Balakrishna, Daniel Seita, Jennifer Grannen, Minho Hwang, Ryan Hoque, Joseph E. Gonzalez, Nawid Jamali, Katsu Yamane, Soshi Iba, Ken Goldberg IEEE International Conference on Robotics and Automation (ICRA), 2021. website / pdf |
|
Samuel Paradis, Minho Hwang, Brijen Thananjeyan, Jeffrey Ichnowski, Daniel Seita, Danyal Fer, Thomas Low, Joseph E. Gonzalez, Ken Goldberg IEEE International Conference on Robotics and Automation (ICRA), 2021. website / pdf |
|
Jennifer Grannen*, Priya Sundaresan*, Brijen Thananjeyan, Jeffrey Ichnowski, Ashwin Balakrishna, Minho Hwang, Vainavi Viswanath, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg Conference on Robot Learning (CoRL), 2020. Oral Presentation website / pdf |
|
Minho Hwang, Brijen Thananjeyan, Sam Paradis, Daniel Seita, Jeffrey Ichnowski, Danyal Fer, Thomas Low, Ken Goldberg IEEE Robotics and Automation Letters (RA-L) July 2020. website / pdf |
|
Daniel Seita, Aditya Ganapathi, Ryan Hoque, Minho Hwang, Edward Cen, Ajay Kumar Tanwani, Ashwin Balakrishna, Brijen Thananjeyan, Jeffrey Ichnowski, Nawid Jamali, Katsu Yamane, Soshi Iba, John Canny, Ken Goldberg IEEE International Conference on Intelligent Robots and Systems (IROS), 2020. website / pdf |
|
|
Brijen Thananjeyan*, Ashwin Balakrishna*, Ugo Rosolia, Joseph E. Gonzalez, Aaron Ames, Ken Goldberg Workshop on the Algorithmic Foundations of Robotics (WAFR), 2020. |
|
Brijen Thananjeyan*, Ashwin Balakrishna*, Ugo Rosolia, Felix Li, Rowan McAllister, Joseph E. Gonzalez, Sergey Levine, Francesco Borrelli, Ken Goldberg IEEE Robotics and Automation Letters (RA-L) February 2020 and IEEE International Conference on Robotics and Automation (ICRA), 2020. website / pdf |
|
Priya Sundaresan, Jennifer Grannen, Brijen Thananjeyan, Ashwin Balakrishna, Michael Laskey, Kevin Stone, Joseph E. Gonzalez, Ken Goldberg IEEE International Conference on Robotics and Automation (ICRA), 2020. website / pdf |
|
|
Minho Hwang*, Daniel Seita*, Brijen Thananjeyan, Jeffrey Ichnowski, Samuel Paradis, Danyal Fer, Thomas Low, Ken Goldberg International Symposium on Medical Robotics (ISMR), 2020. website / pdf |
|
Ashwin Balakrishna*, Brijen Thananjeyan*, Jonathan Lee, Arsh Zahed, Felix Li, Joseph E. Gonzalez, Ken Goldberg Conference on Robot Learning (CoRL), 2019. Oral Presentation |
|
Priya Sundaresan, Brijen Thananjeyan, Johnathan Chiu, Danyal Fer, Ken Goldberg IEEE International Conference on Automation Science and Engineering (CASE), 2019. |
|
|
Ashwin Balakrishna*, Brijen Thananjeyan*, Jonathan Lee, Arsh Zahed, Felix Li, Joseph E. Gonzalez, Ken Goldberg Real World Sequential Decision Making Workshop at the International Conference on Machine Learning (ICML), 2019. |
|
|
Brijen Thananjeyan, Ajay Tanwani, Jessica Ji, Danyal Fer, Vatsal Patel, Sanjay Krishnan, Ken Goldberg International Symposium on Medical Robotics (ISMR), 2019. Oral Presentation |
|
|
Ajay Kumar Tanwani, Jonathan Lee, Brijen Thananjeyan, Michael Laskey, Sanjay Krishnan, Roy Fox, Ken Goldberg, and Sylvain Calinon Workshop on the Algorithmic Foundations of Robotics (WAFR), 2018. |
|
|
Sanjay Krishnan, Animesh Garg, Richard Liaw, Brijen Thananjeyan, Lauren Miller, Florian T Pokorny, Ken Goldberg The International Journal of Robotics Research (IJRR). Volume 37. Issue 9. July, 2018. |
|
|
Brijen Thananjeyan, Animesh Garg, Sanjay Krishnan, Carolyn Chen, Lauren Miller, Ken Goldberg IEEE International Conference on Robotics and Automation (ICRA), 2017. |
|
|
Sanjay Krishnan, Animesh Garg, Richard Liaw, Brijen Thananjeyan, Lauren Miller, Florian T. Pokorny, and Ken Goldberg Workshop on Algorithmic Foundations of Robotics (WAFR), 2016. |
|
|
|
Senior Research Scientist
January 2026 – Present
|

|
Senior Research Scientist
February 2022 – January 2026

|

|
Research Intern
February 2021 – June 2021


|

|
Software Engineering Intern
June 2017 – August 2017
|
|
|
|
Organizers: Ashwin Balakrishna, Brijen Thananjeyan, Daniel S. Brown, Sylvia Herbert, Marek Petrik, Melanie Zeilinger This workshop brings together researchers from both industry and academia working on a wide range of topics from theoretical work on safety guarantees for learning-based control systems to practical systems for effective deployment in safety critical settings. |
|
|